概要
ロボットガイドプロジェクトでは、データラベル付けには時間がかかる場合があります。
Mech-DLKのスマートラベル付け機能(スマートラベル付けツール、事前ラベル付けツール、スーパーモデルラベル付けツール)を使用すればラベル付けの効率を大幅に向上することが可能です。
本ページではMech-DLKのスマートラベル付け機能の使用方法や注意事項などを説明します。
注:スマートラベル付け機能はインスタンスセグメンテーションと対象物検出で使用可能
以下では Mech-DLK 2.5.2 を使用して説明していきます。
1.スマートラベル付けツール
1.1 機能
画像上のワーク範囲をクリックすることで領域が自動的に生成され、簡単にラベル付けが可能です。
1.2使用手順
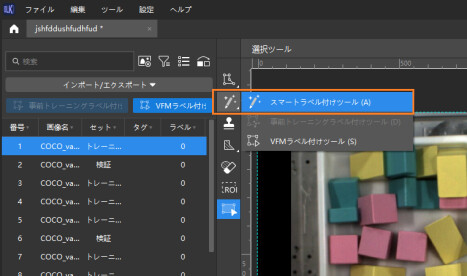
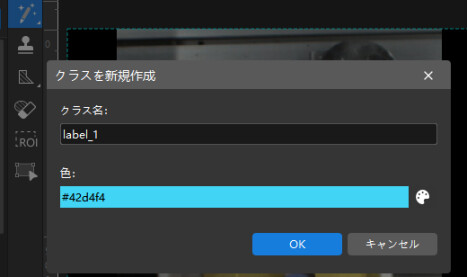
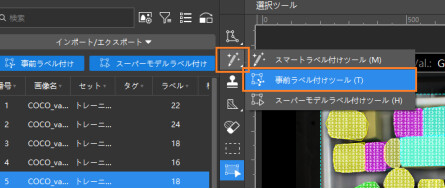
①「スマートラベル付けツール」アイコンを右クリックして「スマートラベル付けツール」を選択します。この機能を初めて使用する時にはプロンプトウィンドウが表示され、クラスと色が設定できます。この手順は時間がかかる場合があります。
②対象物をラベル付けして調整します。
③「適用」ボタンをクリックするか「Enter」キーを押して適用します。
2.事前ラベル付けツール
2.1機能
自動的にワーク領域を生成し、より効率的にラベル付け可能です。
ただし機能を使用するには、事前にモデルをトレーニング・検証する必要があります。事前ラベル付けツールは、手動で付けたラベルがないデータにしか使用できません。
手動で付けられたラベルがあるデータにたいしては、それらのラベルをクリアした上でご使用ください。
2.2使用手順
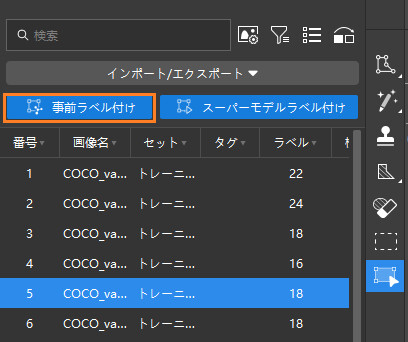
①「事前ラベル付け」ボタンをクリックしてラベル付けを一括実行します。
1枚、複数枚の画像を処理したい場合は、画像を選択してから「スマートラベル付けツール」アイコンの右クリックメニューの「事前ラベル付けツール」を選択します。
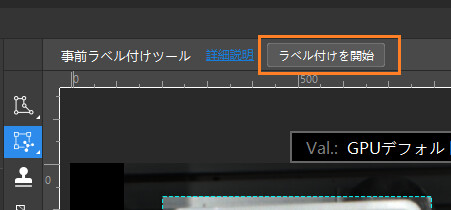
②「ラベル付けを開始」ボタンをクリックします。
2.3注意
ラベル付けの精度はモデルの精度に関わるため、精度の高いモデルをトレーニングしてから事前ラベル付けツールを使用することを推奨します。
3.スーパーモデルラベル付けツール
3.1機能
Mech-Mindで作成したスーパーモデルを使用して、自動的にワークの領域を生成し大幅に効率を上げることが可能です。マウスでクリックしたり事前トレーニングする必要もなく、スマートラベル付けと事前ラベル付けよりも効果的な機能となっています。
スーパーモデルラベル付け機能を使用した後はラベル付けデータの正確性を評価するだけで、ディープラーニングのモデルが作成できます。
3.2使用手順
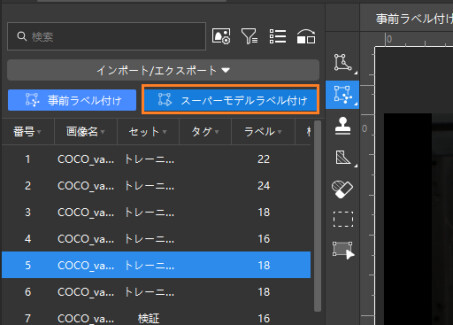
「スーパーモデルラベル付け」ボタンをクリックして一括ラベル付けします。
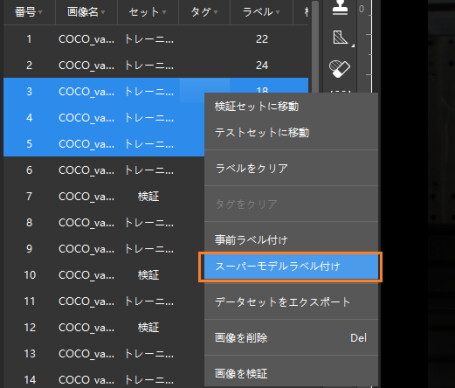
1枚または複数枚の画像を処理したい場合は画像を選択してから「スマートラベル付けツール」アイコンの右クリックメニューの「スーパーモデルラベル付けツール」を選択します。
3.3注意
この方法はラベル付け完了まで少し時間かかります。
初めて使用する時に読み込みにも時間がかかるのでご注意ください。
また、使用するコンピュータのグラフィックカードメモリは6GB以上である必要があります。
4.Mech-VisionでMaskからLabelに変換する(スクリプト)
上記のMech-DLKのツールに加え、Mech-VisionでMaskからLabelに変換することでもラベル付けの効率向上を実現できます。
4.1適用シーン
マッチングの効果がいいが認識のミスが発生した場合、またマッチングだけで対象物点群とシーンの点群を識別できない場合に使用できます。
4.2使用手順
①Mech-Visionでの操作
スクリプトをプロジェクトのパスに保存します。
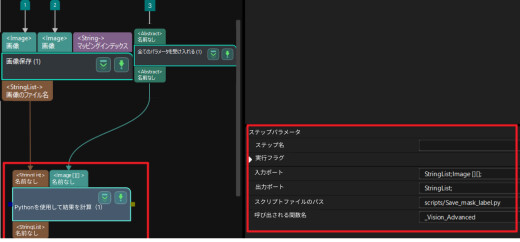
Mech-Visionでは、「Pythonを使用して結果を計算」ステップのパラメータを以下のように設定します。
入力データは以下の通りです:
1:カメラ深度画像。
2:カメラカラー画像。
3:対象物マスク
対象物マスクは対象物の点群を2D画像に投影して生成されます。マッチングにSTLモデルを使用した場合は、出力された点群をそのまま使用して2D画像に投影することで作成します。
STLによって生成された点群または完全な物体点群を修正しなければならない場合は、以下の方法で2D画像に変換します。なお、テンプレート点群は 読み取られた点群を編集した後 取得される点にご注意ください。
②Mech-DLKへのインポート
マスクと2D画像を取得してからMech-DLKにインポートするとします。
データ保存フォルダを開き、「label」にあるファイルを全部「color」フォルダにコピーします。
そのあとファイル数を確認し、JPGファイルとXMLファイルの数が一致しているかどうかチェックします。
一致していないとインポートできないのでご注意ください。
Mech-DLKでプロジェクト新規作成してフォルダをインポートします。
4.3注意
マッチングの精度が重要ですので、データをインポートした後は手動でチェックし 異常や漏れなどがあれば修正してください。
関連ファイル
- MaskからLabelへ変換するスクリプト:scripts.7z (4.4 KB)